

我是小莫,众所周知,Elmo EASII是一款可以为工程师们提供更加方便、高效的设备调试解决方案的应用软件,EASII的许多创新功能深受用户喜欢,为了大家能够更好的理解及使用这些功能,前两期小莫已经对高阶滤波器、高级调谐、快速软开关技术,以及摩擦补偿等调试功能做了详细介绍。
本期小莫将带领大家继续探索的EASII的创新功能:3步增益计划和速度/位置增益计划,了解如何通过增益调度实现对运动的精准控制。
3步增益计划
增益调度可对伺服运动的速度和位置进行微调控制,使用户能够根据驱动器的运动实时改变驱动器的增益。
Elmo的3步增益调度为不同阶段的伺服运动提供了专用的可配置参数:
● 第1步:轴静止(不运动)
● 第2步:轴运动
● 第3步:运动结束后(可配置的时间段)立即开始
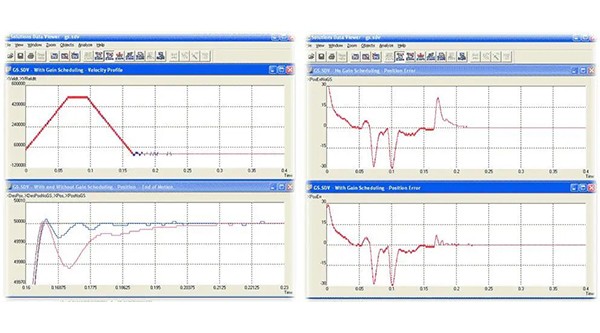
下图举例说明了增益调度如何改善运动结束时的稳定性能。左边是速度曲线,以及增益调度效果的详细前后缩放图。右侧是增益调度效果的前后位置误差图。
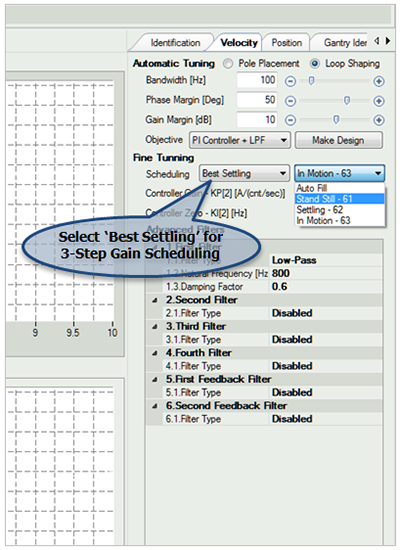
使用Elmo Application Studio (EAS)可以轻松配置增益调度
性能特点:
● 可在选定阶段对驱动器运动进行精细控制
● 驱动器控制器增益可实时更改
● EAS 可轻松配置
速度和位置增益计划
Elmo伺服驱动器的“增益调度”可自动调整控制器和滤波器的速度、位置或轮廓参数。它根据上述参数计算电机的实际状态,并在运行中相应地改变控制器。
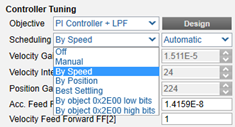
有四种增益计划选项可供选择,每种选项都包含不同的工作方法。
1、在下列情况下,需要通过速度指令(或传感器)进行增益调度:
– 设备之间低速和高速表现的差异
– 低速时缺乏反馈信息
2、当电机位置发生机械变化时,需要通过位置指令(或传感器)进行增益调度。
3、当需要高性能的稳定时间时,需要根据轮廓状态进行增益调度(“最佳稳定”调度)。
4、通过滤波器调度索引进行增益调度,该手动模式由对象 0x2E00低8位选择。
位置/速度环中最多有 63 个控制器。您可以使用特定的控制器,也可以让增益调度机制根据所选方法自动选择控制器。
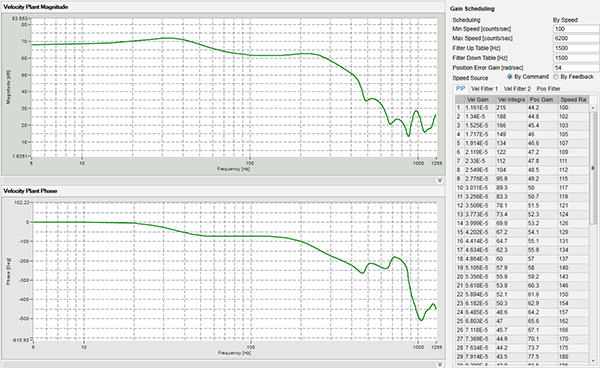
通过速度指令进行调度
性能特点:
● “即时”自动调整位置/速度参数
● 优化不同负载性能的理想选择
● 在不同的运行环境下,速度都非常稳定快速
● 满足极端运行要求的理想选择
(来源:Elmo埃莫运动控制)






































































 京公网安备 11011202001138号
京公网安备 11011202001138号