

汽包水位是影响锅炉安全运行的一个重要参数,汽包水位过高或者过低的后果都非常严重,因此对汽包水位必须进行严格控制。DCS技术快速发展并广泛应用于过程控制领域,极大地提高了控制系统性能,它已经成为当今自动控制领域不可缺少的重要设备。下面介绍一下TDCS9200集散控制系统在锅炉汽包水位控制中的应用。
本文结合中小型热电发电厂锅炉系统的实际要求,探讨系统自动控制的原理和系统调节规则。论文着重对锅炉气包水位的控制进行研究,从分析影响汽包水位的各种因素出发,重点分析了锅炉汽包水位的“虚假水位现象”,提出了锅炉汽包水位控制系统的三冲量控制方案,以自动控制理论与计算机技术为基础,利用正泰中自Chitic软件进行组态设计。
一、背景
锅炉正常运行中,汽包水位是一个重要的监视参数,它反映了锅炉负荷与给水的动态平衡关系。锅炉汽包水位控制是维持锅筒水位在允许的范围内,使锅炉的给水量与锅炉的蒸发量达到平衡。由于锅炉的水位同时受到锅炉侧和气轮机侧的影响,因此,当锅炉负荷变化或气轮机用汽量变化时,通过给水调节系统保持锅炉的水位正常是保证锅炉和汽轮机安全运行的重要条件。水位过高或过低,都是不允许的。水位过高会影响汽水分离器的正常工作,严重时会导致蒸汽带水增加,使过热器管壁和气轮机叶片结垢,造成事故;锅炉出口蒸汽带水过多还会使过热蒸汽温度产生急剧变化。水位过低,则会破坏正常水循环,影响省煤器运行,危及水冷壁受热面的安全,容易使水全部汽化烧坏锅炉甚至发生爆炸。因此及时而准确地把水位控制在允许的范围之内,并适应各种工况的运行,是保证机炉安全的重要条件。鉴于汽包水位控制的难度,选用浙江正泰中自控制工程有限公司生产的TDCS9200 集散控制系统对汽包水位控制进行设计。
二、控制方案
汽包水位的动态特性初看似乎和水槽一样,由给水量和蒸汽出气量影响汽包水位的高低。但实际情况并非如此,夹杂着大量蒸汽气泡的水就是其中最突出的一点,因为蒸汽泡的体积是随着汽包压力和温度的变化而变化的。如果有某种原因使气泡的总体积发生了变化,即使水循环系统的总水量没有变化,汽包水位也会随之发生改变从而影响水位的稳定。影响汽包水位主要有三个因素:给水扰动的影响、汽轮机耗汽量扰动的影响、燃料量扰动的影响。所以不能采取简单的控制方案,控制方案必须同时克服三项扰动。经过分析,决定采取三冲量控制方案,即前馈—反馈—串级复合控制系统。该三冲量控制系统包含给水流量控制回路和汽包水位控制回路两个控制回路以及一个蒸汽流量前馈参数,实质上是蒸汽流量前馈与水位-流量串级系统组成的复合控制系统。串级控制系统的主参数是汽包水位,副参数是给水流量,所以主调节回路是给水流量调节回路,副调节回路是液位调节回路。此控制方案一方面可以克服给水扰动,使给水流量自行调节,另一方面可以有效地抑制“虚假水位”现象。当蒸汽流量发生变化时,锅炉汽包水位控制系统中的给水流量控制回路可迅速改变进水量的大小以完成粗调,然后再由汽包水位调节器完成水位的细调维持汽包水位的稳定。该控制方案的示意图和结构图如下所示。
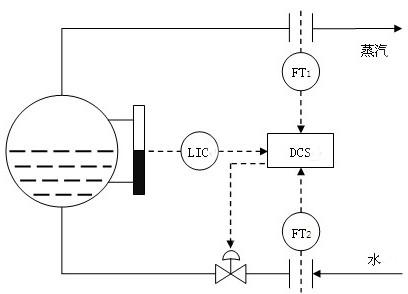
图1汽包水位双冲量控制系统
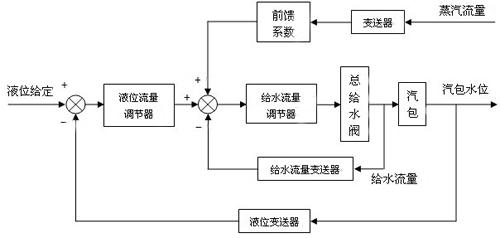
图2汽包水位双冲量控制系统框图
汽包水位控制复杂,干扰因素多,由于汽包是高压元件,在操作不当的情况下会出现危险,所以并不适合手动操作。通过综合分析,决定采用正泰中自的TDCS9200集散控制系统来设计控制方案。为保证系统运行的可靠性,TDCS9200在很多方面采取冗余设计(包括电源冗余、主控模版冗余、网络冗余等)。
三、汽包水位控制的软件实现
根据现场锅炉汽水系统的工艺流程设计出如下组态流程图,图3:
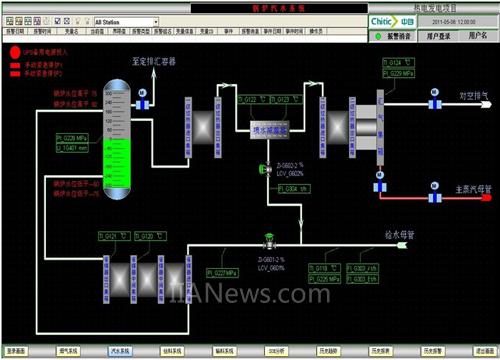
图3汽包水位控制的工艺流程图
图中给水母管向省煤器给水,经过省煤器的预热再输入汽包,在汽包内经加热将水变成饱和蒸汽,蒸汽经过一级过热器加热后通过喷水减温器进行降温,降温后的蒸汽再经过二级过热器继续加热,最终形成温度达到需求的过热蒸汽,最后蒸汽经主蒸汽母管输出。锅炉汽水系统通常是通过控制汽包水位达到控制汽包输出蒸汽量的目的。因而,在汽包水位出现越限(或不稳定)时要判断是何处出现问题,即何处出现故障。通常汽包水位要设置2个水位限制:高限(H1)和低限(H2),在正常运行的状态下,水位维持在高低限之间,即H2≤H≤H1,所以当水位出现H≥H1或H≤H2时,就表示系统出现了异常。影响系统出现故障的原因很多,如水泵故障、阀门故障、变送器故障、调节器故障等均会导致水位越限。本设计还要解决的问题就是当发生异常情况时,控制系统能够自动做出反应消除影响或发出警报。
程序语言:
由上文汽包三冲量控制方案设计出控制算法得到如图4所示的FBD语言。
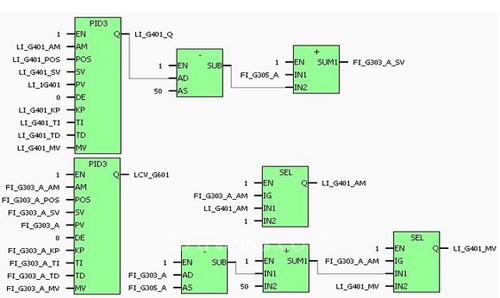
图4锅炉给水流量电动调节阀指令
⑴图中变量位号意义为:
LI_1G401~1#锅炉汽包水位,FI_G303_A~锅炉主给水母管流量1,LCV_G601~锅炉给水流量电动调节阀输出指令,FI_G305_A~主蒸汽管流量1。
⑵各算法块的意义:
模块(SEL)功能为根据输入IG的值,选择IN1或IN2的值输出,若IG等于0,则输出Q=IN1,否则输出Q=IN2。模块(-)功能为将两个输入变量的值进行减法操作,输出变量的值为单精度浮点。模块(+)功能为将两个输入变量的值进行加法操作,输出变量的值为单精度浮点。
⑶算法意义:
图中上面的PID流程为汽包液位调节回路(主回路)。汽包水位给定值输入到上面的PID3模块的SV项,经过PID运算(输出值Q量程为0~100),输出到右边的减法算法块减去50,再与主蒸汽流量(前馈参数)相加得到锅炉主给水母管流量调节回路(副回路)的给定值。最后通过下面的PID3模块运算得到给水调节阀的开度指令(输出值Q量程0~100对应调节阀开度0%~100%)。此控制方案以主蒸汽管流量变化(FI_G305_A)为优先参数,水位参数次之。由于本设计的对象为0~90t/h汽包,从汽包水位的稳定性方面考虑,设定前馈系数为1,故省去图中上面PID流程中加法模块前的乘法模块。
中间(SEL)算法块意义为:当副回路处于手动调节状态时(AM=1),主回路必须处于手动状态。而当副回路处于自动状态时(AM=0),主回路可处于自动或手动状态。
右下角算法流程的作用是:当副回路从自动状态切换到手动状态时(AM从0~1),原本处于自动状态的主回路也变成手动状态,而且主回路的手操值MV(PID3中手动状态下Q=MV)自动跟踪副回路的测量值PV,从而系统可进行无扰动切换。
⑷锅炉给水流量调节控制面框:
锅炉给水流量调节控制面框图5所示。图中KP为比例增益,KI为积分时间,KD为微分时间,PV为测量值,SV为给定值,下面为手/自动按钮。

图5 锅炉给水流量调节控制面框
本设计利用Chitic工业控制应用软件平台,按系统的要求进行严格的设计,克服了各种扰动所带来的诸多难点,对锅炉汽包水位系统实现了良好的控制与监测功能。PID设计是本次设计的核心部分,本方案能够很好的实现水位控制和给水的自动化调节。本锅炉汽包水位控制系统的组态设计以单冲量控制理论和串级三冲量控制理论为基础,采用了两个比例积分调节器(主副调节器),进行了PI参数的整定,可实现控制系统的无扰切换以及可靠的跟踪技术,并可按操作人员的要求或特殊情况下切为手动控制。实现了在“虚假水位”的情况下,系统能够进行可靠准确的自动调节。





































































 京公网安备 11011202001138号
京公网安备 11011202001138号