该指令的助记符、指令代码、操作数范围、程序步如下表1所示。
表1 传送指令表

1) 传送指令 MOV 指令是将源操作数内的数据传送到指定的目标操作数内,即 [S] → [D] 。
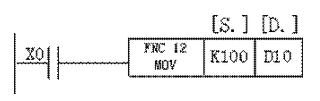
图1传送指令基本形式
2) 传送指令 MOV 的说明如图。当 X0=ON 时,源操作数 [S] 中的常数 K100 传送到目标操作元件D10 中 。当指令执行时,常数 K100 自动转换成二进制数。当 X0 断开时,指令不执行,数据保持不变。


|
|
该指令的助记符、指令代码、操作数范围、程序步如下表1所示。
表1 传送指令表
1) 传送指令 MOV 指令是将源操作数内的数据传送到指定的目标操作数内,即 [S] → [D] 。
图1传送指令基本形式
2) 传送指令 MOV 的说明如图。当 X0=ON 时,源操作数 [S] 中的常数 K100 传送到目标操作元件D10 中 。当指令执行时,常数 K100 自动转换成二进制数。当 X0 断开时,指令不执行,数据保持不变。
 ABB以电气问题解决专家之志,回答未来之问。讲述与中国用户携手开拓创新、引领行业发展、推动绿色转型的合作故事,共同谱写安全、智慧和可持续的电气化未来。
ABB以电气问题解决专家之志,回答未来之问。讲述与中国用户携手开拓创新、引领行业发展、推动绿色转型的合作故事,共同谱写安全、智慧和可持续的电气化未来。
在具身智能跨越商业化临界点的关键时刻,我们以“普罗精工”为核,让机器人真正胜任复杂多变的工业现场;我们以“寰宇共生”为愿

本期杂志将展示数字化与智能自动化解决方案不仅赋能技术,更重要的是服务于人。协助用户将复杂问题化繁为简,提高透明度与效率,

































































微信扫一扫,关注IIANews公众号
微信扫一扫,进入IIANews微网


 京公网安备 11011202001138号
京公网安备 11011202001138号