

工艺说明
手机中框涂胶要求将热熔胶
均匀涂敷于手机中框内凸起的棱线上
要求涂敷胶水平滑、精度高
不能有堆胶、断胶情况出现

除了连续涂胶
同时还要满足高速点位涂胶
因此整机除高精度运动与轨迹控制
同时还要实现高速点位运动
控制关键点
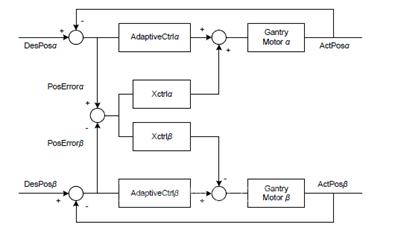
1、龙门精度控制
CK3M通过独特交叉解耦控制
保证龙门架在运行中的绝对同步
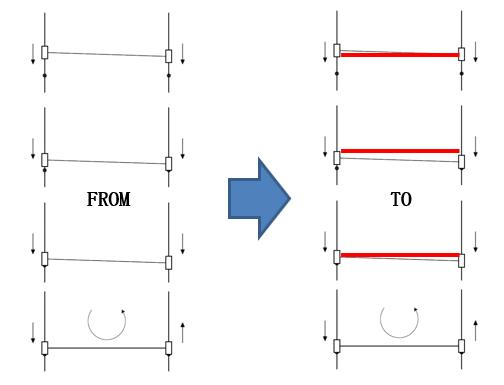
同时专为龙门设计的回零方式
保证回零后龙门架的水平
2、精确出胶控制
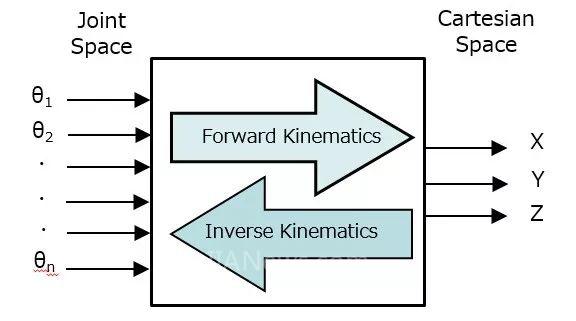
通过将XY轴的指令矢量增量合成为一虚轴
通过正逆解+前瞻提前计算点胶位置
并通过PSO硬件位置比较输出功能
对进行位置实时比较并控制胶阀输出
保证指令位置和实际点胶位置准确吻合
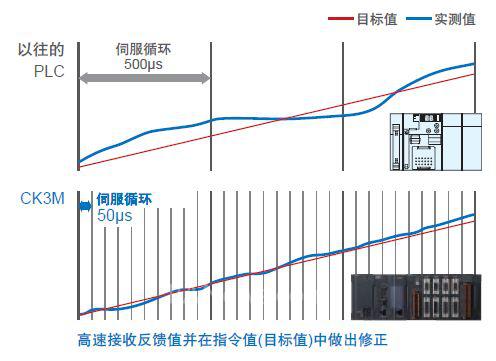
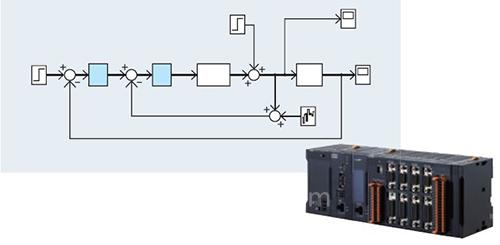
3、高精度位置控制
CK3M凭借高速伺服循环实现高精度轨迹控制
通过高速接受反馈值
并在指令值(目标值)中做出修正
实现更接近指令值的轨迹控制
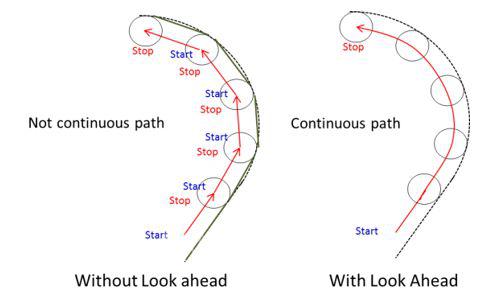
4、转角速度控制
通常在走直角或小圆角时
普通控制器需要减速过渡
CK3M可以通过内部自动混合轨迹功能
将矢量速度变化量控制到最小
无混合控制
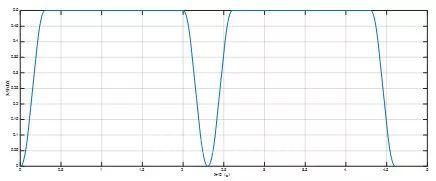
混合控制
混合控制+特殊轨迹优化
5、高度控制
应对工件表面起伏时,可以:
根据工件图纸预先编辑好Z轴高度
控制Z轴随运动变化
or
通过距离传感器
通过伺服级联功能
实时调整Z轴高度
产品优势
高自由度的编程
能够用C语言/PMAC专用语言/G代码等语言
编写客户独有的复杂、专业算法
可以自由编写描绘专业而复杂的
轨迹的机器人机构控制程序

除了自定义标准G代码外
客户还可安装具备独有功能的G代码

自定义伺服算法
可以在控制器内装入伺服驱动器的全闭环
能够实现针对装置的机械结构进行优化的
抑振控制等客户独有的装置控制
CK3M方案配置
运动控制器: CK3M系列
伺服系统: 1S系列
位移传感器:ZX-L-N系列
了解更多信息,请点击:






































































 京公网安备 11011202001138号
京公网安备 11011202001138号