

方案背景
线缆行业目前正在向产品多样化、生产自动化等更高的技术层次发展。在线缆行业中,目前应用最广泛的就是放线架,而动力放线架又是其中技术含量较高的一种设备。动力放线架一般要求变频器具有PID调节功能,并且PID是可以双向控制的。在目前的行业应用中,四方电气V560矢量型变频器不加任何辅助配件即可实现该控制要求。本文拟结合四方电气V560变频器自带的PID控制器,介绍一种针对线缆行业设计的恒张力控制的主动放线系统。
工艺介绍
动力放线架作为多种设备的最前端,在线缆行业中有着广泛的应用。一般来说,对动力放线架的要求有以下几点:
1.在引取速度加快时,放线速度也跟着引取速度快速加速;
2.在引取速度减速时,放线速度也跟着引取速度减速;
3.当稳定运行在某个速度时,放线架的摆杆要稳定;
4.当出现松线和断线的时候,要求放线盘可以进行自动反转。
以上几点要求全部由变频器的PID功能完成,而且要求变频器对速度的反应要相当灵敏。
控制方案
放线的恒张力同步控制,是通过系统中张力摆杆的位置变化,输出电压信号回馈给变频器的PID控制系统,经过PID控制器的自动运算,变频器改变输出频率从而调节放线电机的运行速度以维持张力恒定。实际上,这是一种间接张力控制方式,因为PID的微调是基于摆杆的实际位置进行运算的,而不是直接进行张力运算,而位置与张力又满足一定的函数关系,所以通过对摆杆实际位置的控制,也可以实现恒张力控制的要求。
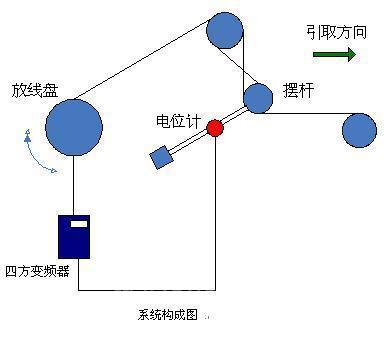
控制原理
系统采用开环矢量模式,模拟输入AI1接摆杆位置反馈信号(0~10V),将期望摆杆稳定运行的位置点设定为PID给定值。系统运行过程中始终将反馈信号与给定值做比较,PID控制器根据其差值自动运算,改变变频器的输出频率以调节放线电机的转速,保证摆杆位置的稳定,从而达到恒张力的控制。系统原理框图如下:

控制效果
基于四方电气V560矢量型变频器的恒张力主动放线控制系统,该方案对速度的反应非常灵敏,在快速速度跟踪和松线反向收线两方面完全满足设备技术指标,同时还可分别对正向放线速度和反向收线速度分别做限定,兼顾对放线速度需求及断线时收线速度保护,目前已成功的应用于多个主动放线系统中,应用效果良好。






































































 京公网安备 11011202001138号
京公网安备 11011202001138号