

引言
该客户是专注于马达生产设备开发研究和生产制造的专业企业,产品广泛应用于电动工具、吸尘器、汽车电机、摩托车起步电机等领域。其中串激励转子绕线机、转子和整流子外圆精车机。
1 简介
目前该客户正在开发一种新产品,电机定子外线圈高速绕线机。需要用到其2轴伺服直线差补功能。客户原开发机使用的是研华adam-5000系列的分布式io站(plc),使用其直线插补功能,操作面板使用的是中达电通的简易数控系统。
2 系统工艺流程
放线轮放线→张力摆杆控制张力→进入旋转绕线机构→绕到需要绕线的外定子上,工艺流程如图1所示。
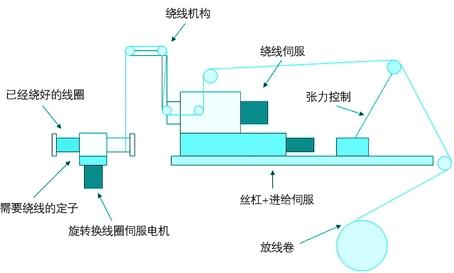
图1 工艺流程示意图
3 设计要求
绕线伺服旋转绕线,其速度可设定,运转时恒定,漆包线受张力控制,进退伺服利用丝杠控制绕线头前后进退,还有一套伺服用于旋转变换定子线圈受绕角度。进退伺服在一个线圈上进给分段,每段每匝间隙不同。分布在线圈上以匝数来定绕线多少。
绕线速度:每分钟最大3000匝(可以根据使用要求调整);每匝间距可调整,最小线宽:0.7mm。
并且不同匝宽的过渡要平稳,绕线机在换向处不能出现绕线不均匀、堆积现象。
4 方案设计及主要配置
鉴于以上使用要求和机械机械结构,我们设计了如下的方案:
通过丝杠导程,每段规定的匝数,每匝的间距,伺服定义的每转脉冲数可以推导出每段进给的脉冲数,即x轴方向上的puls值:
p(x轴)=(d*n)/l*p
(p:脉冲数;d:每匝间距;n:匝数;l:丝杠导程;p:每转脉冲数)
由于设定的转速恒定,通过每段规定的匝数(即绕线的的圈数),伺服定义的每转脉冲数,即可以推导出每段绕线的长度的脉冲数,即y轴的puls值:
p(y轴)= n*p
(p:脉冲数;n:匝数即圈数;p:每转脉冲数)
z轴用于切换调整电机定子外线圈绕线柱头,其旋转角度由电机定子外线圈绕线柱头数决定,由每次相同批次绕线前事先设定。
[DividePage:NextPage]
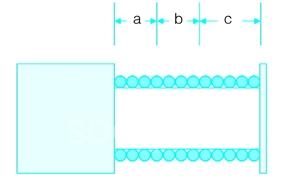
图2 电机定子外线圈绕线形式示意图
在绕线时x轴和y轴实时联动,根据设定的好的参数,两轴分别走相应的脉冲数,每段之间匝距变换,设定加减速时间,其实这就相当于绕线伺服和进给伺服之间做一个直线插补功能。而由于cp1h本身没有直线插补功能,但是cp1h有着独立4轴100k的高速脉冲输出,在计算量不是很大的情况下,其实也可以做到直线插补功能。这就为本系统使用cp1h创造了条件。
所以本方案使用omron的解决方案配置为:
cp1h-xa40dt-d 一台,
cpm1a-20edr1一台,
cp1w-cif01一台,
r88d-gt08h-z 两台,
r88d-gt04h-z一台,
r88m-g75030h-s2-z 两台,
r88m-g40030h-s2-z一台,
ns8-tv00b-ecv2一台。
本方案主要难点在于cp1h的本身不带有直线插补功能,为此需要设计一套直线插补的程序,本方案中使用了时间分割直线插补算法,此方法在一些书籍中都有论述,这里就不做介绍了。由于本方案涉及多步连续运行,所以在这里将直线插补程序参照omron的nc模块的内存操作模式,打包成功能块,如图3所示。
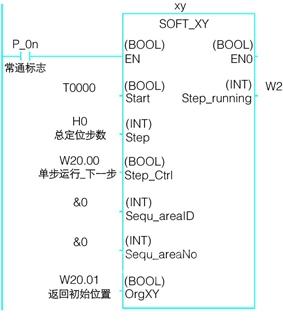
图3 功能块应用图示
[DividePage:NextPage]
其中:
输入:
start: 启动定位序列位。
step: 定位序列数设定——设定范围&1~&100。
step_ctrl:启动下一步(可结合内存设定中,独立模式时生效)。
sequ_areaid:定位序列设定区域。
0:d区
1:h区
sequ_areano:定位序列起始地址设定。
sequ_areaid为0时:设定范围&0~&9900
sequ_areaid为1时:设定范围&0~&400
orgxy:返回初始位置位(参见内存定位序列设定)。
输出:
step_running: 当前定位步号。
5 内存定位序列
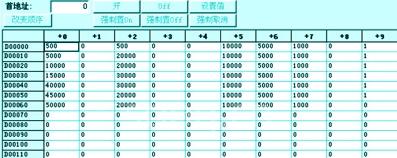
图4 内存定位序列示意
以sequ_areaid=0;sequ_areano=0为例,内存设定如图4所示。
a:每个定位序列占有10个字。
b:设定内容:
d0~d1:x轴位置。
d2~d3:y轴位置。
d4:插补起始速度。
d5:插补加速度。
d6:插补减速度。
d7~d8:插补目标速度。
d9:定位模式设定
0:独立模式 本行所设定序列完成后即停止,可由功能块输入“step_ctrl”启动下个序列。
1:连续模式 本行所设定序列完成后继续运行下个序列。
c:第一个序列为起始位置,如不需要使用可将x、y设定为(0,0)。当功能块输入
“orgxy”为“on”时,返回此处设定位置。
这样在实际使用该功能块配合由用户在触摸屏上设定的参数而计算出来的结果赋值到序列中。构成完整的输出。来达到给电机定子外线圈按规定绕线的目的。
实际设备安装完毕后对不同的进行了电机定子外线圈试绕线,结果比较满意,绕线匝数,每匝间距精度能够达到设计要求。图5、图6是设备图和绕线成品图。

图5 左图开始绕线,右图换匝

图6 左图换定子,右图绕好的定子线圈






































































 京公网安备 11011202001138号
京公网安备 11011202001138号