

基于PLCnext的PID参数自整定解决方案
今天给大家带来的是基于PLCnext的PID控制,所谓PID控制,即比例积分微分控制,别一看有微积分就吓的不行,认为比较难,其实不是的。下面我就用大白话给大家说一下吧,在实际工业过程控制中,几乎所有模拟量的控制都涉及到PID控制。PID算法是当之无愧的万能算法,因为PID控制具有算法简单、鲁棒性好、可靠性高等特点。
PID控制一般常用于温度、速度等模拟量的控制,PID的控制过程是怎样的呢?且看我给大家娓娓道来,被控的实际模拟量与期望的设定值之间形成偏差,经过PID运算后得到控制量,驱动阀门开度、电机转速(水泵)、热量等,得到我们期望的响应过程,最终消除偏差。PID控制框图如下:
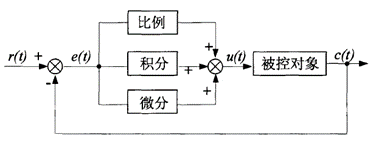
PID运算各校正环节的作用如下:
1)比例环节:调整系统对当前误差的能力,即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用以减小误差。当偏差e(t)=0时,控制作用也为0。
2)积分环节:积分是调节误差的。对偏差进行记忆,用于消除静差,提高系统的无差度,积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,反之则越强。
3) 微分环节:微分就是调节变化的快慢。反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
最重要的问题来了,PID参数的设置和调整直接影响了PID控制回路的品质,其设置和调整过程比较耗时并且很难得到较好的效果,它一般由工作经验丰富的工程师来完成;再加上每个系统的控制环境又各不相同,很多系统呈现滞后性和非线性,PID参数具有自整定功能的需求越来越迫切。怎么才能完美的调节好PID参数呢?别急!!
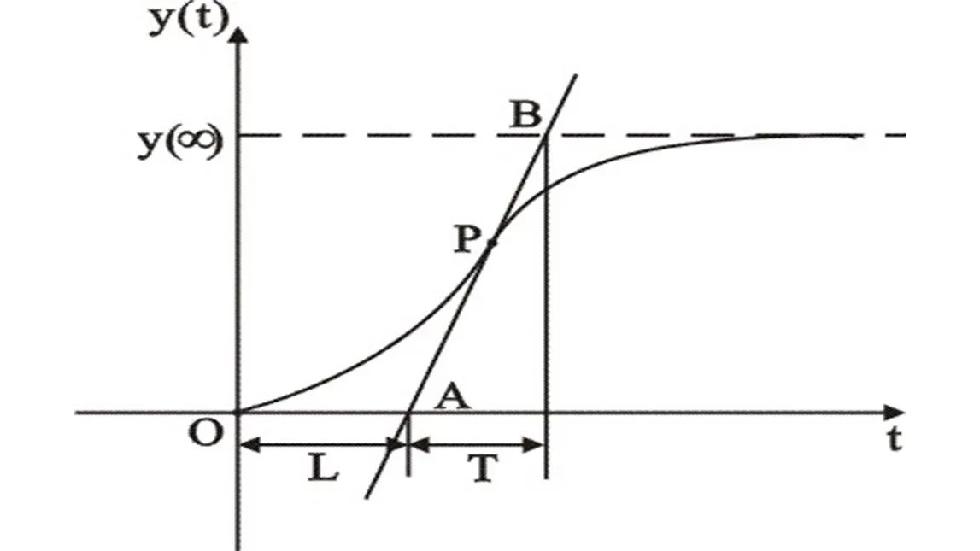
接下来,我们先谈一下PID参数自整定的过程:在系统进入稳态的情况下在输出控制侧施加一个阶跃变化,这个阶跃变化一般为输出控制量的20%,然后观察系统的响应过程,通过分析系统的响应过程计算出相应的PID参数,如下图:
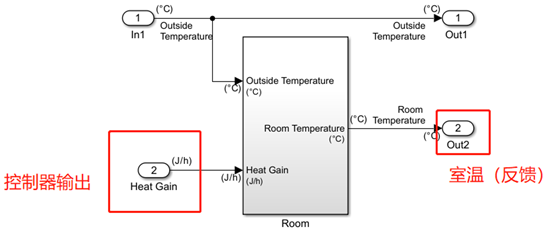
重点来了,基于菲尼克斯PLCnext的PID参数自整定解决方案正好契合PID参数自整定需求。接下来我们就拿个实例来给大家展示一下,首先,菲尼克斯PLCnext控制器支持Matlab Simulink温度控制模型的导入,如下图所示:
其次,使用上面的模型后,我们对菲尼克斯PLCnext控制器PID参数自整定功能进行仿真,自整定过程如下:
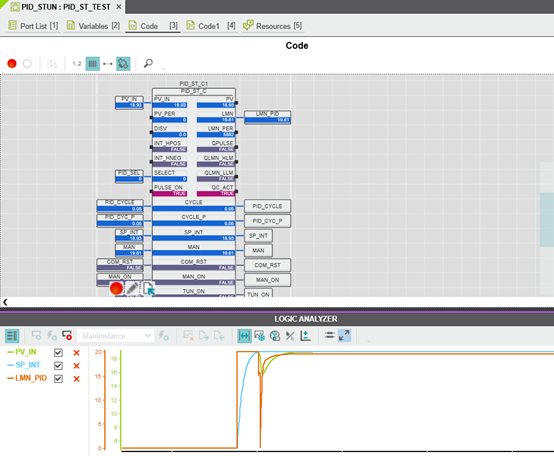
最后,PID参数自整定后控制效果图如下:
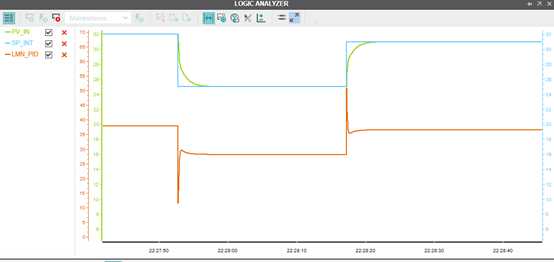
我们从PID控制效果图可以看到,整定后的PID回路在满足快速动态响应的同时,不仅没有超调量,而且也没出现振荡,系统快速达到稳定状态,并且持续保持稳定。
(来源:菲尼克斯自动化)






































































 京公网安备 11011202001138号
京公网安备 11011202001138号