2018年的最后一期ABB机器人培训课堂来和大家见面啦!今天我们要学习的是如何求两点间的距离,话不多说,这就开始!
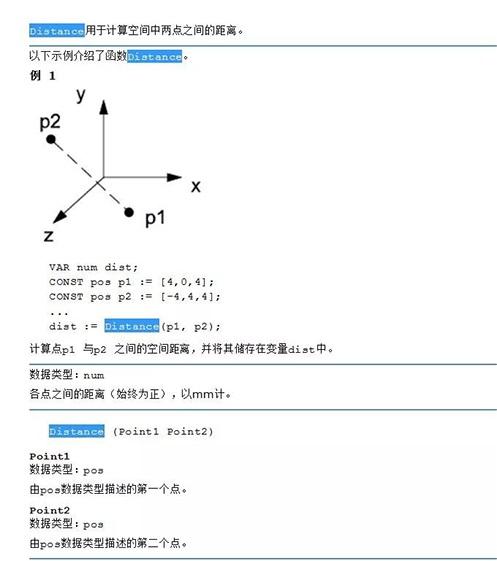
1)ABB机器人提供求两点间距离函数distance
2)distance函数的输入为pos类型,即xyz。如果直接使用robtarget,可以使用来提取pos
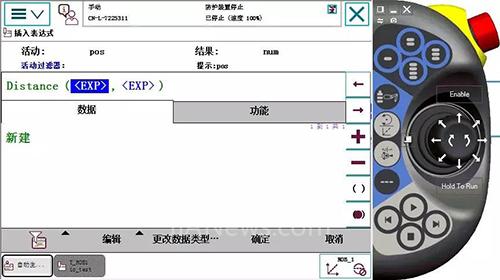
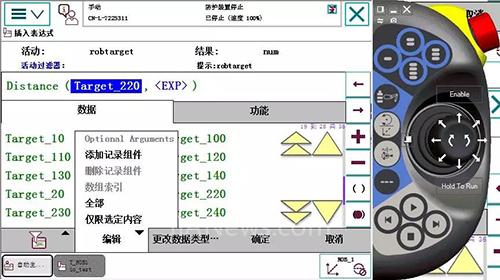
3)插入赋值语句,右边选择function,找到distance
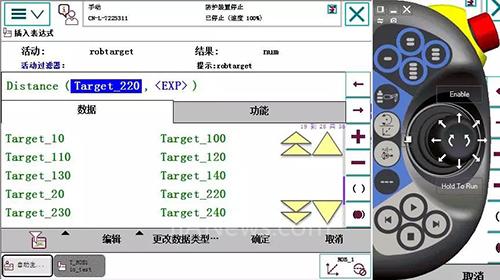
点击更改类型,找到robtarget,选择target_220
点击编辑,添加记录组件,插入.trans
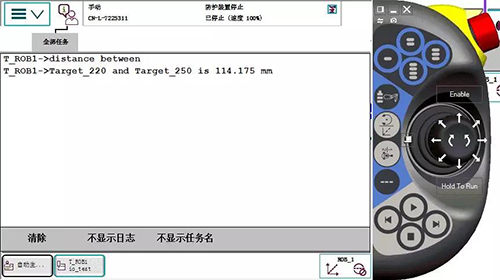
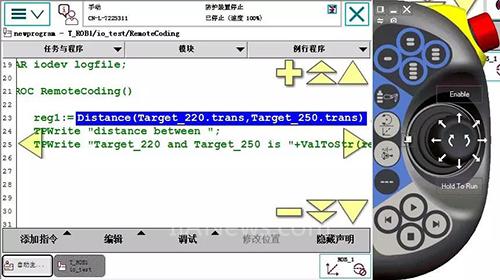
4)计算后可以加入写屏,完整代码如下


|
|
2018年的最后一期ABB机器人培训课堂来和大家见面啦!今天我们要学习的是如何求两点间的距离,话不多说,这就开始!
1)ABB机器人提供求两点间距离函数distance
2)distance函数的输入为pos类型,即xyz。如果直接使用robtarget,可以使用来提取pos
3)插入赋值语句,右边选择function,找到distance
点击更改类型,找到robtarget,选择target_220
点击编辑,添加记录组件,插入.trans
4)计算后可以加入写屏,完整代码如下
 ABB以电气问题解决专家之志,回答未来之问。讲述与中国用户携手开拓创新、引领行业发展、推动绿色转型的合作故事,共同谱写安全、智慧和可持续的电气化未来。
ABB以电气问题解决专家之志,回答未来之问。讲述与中国用户携手开拓创新、引领行业发展、推动绿色转型的合作故事,共同谱写安全、智慧和可持续的电气化未来。
在具身智能跨越商业化临界点的关键时刻,我们以“普罗精工”为核,让机器人真正胜任复杂多变的工业现场;我们以“寰宇共生”为愿

本期杂志将展示数字化与智能自动化解决方案不仅赋能技术,更重要的是服务于人。协助用户将复杂问题化繁为简,提高透明度与效率,

































































微信扫一扫,关注IIANews公众号
微信扫一扫,进入IIANews微网


 京公网安备 11011202001138号
京公网安备 11011202001138号