




引言:Festo 与北京航空航天大学合作OctopusGripper项目,是Festo仿生学习网络首次与亚洲高校开展合作。
3月27日,Festo在德国斯图加特举行汉诺威预热新闻发布会上,发布来自Festo仿生学习网络(Bionic Learning Network)的三大最新成果。
灵感源自于人的手臂,象鼻和章鱼触手,这三款仿生机器人具备柔性、安全的特性,开启了人机交互的广阔可能性。其中OctopusGripper项目是Festo 与北京航空航天大学合作的成果,这也是Festo仿生学习网络首次与亚洲高校开展合作。
OctopusGripper-从自然界章鱼触手获取灵感的抓持器
章鱼是一种迷人的海洋生物,没有骨骼,几乎完全以柔软的肌肉组成,章鱼能够在水下自如地移动,其触手非常灵活和自如,可敏捷地抓捕不同形状、不同尺寸的各种生物如贝类、鱼类、蟹类甚至鲨鱼。
OctopusGripper由气动的软硅胶结构构成。接通压缩空气后,触角将向内弯曲,并可根据各自外形,轻柔地包裹抓取物体。如同其自然原型一样,硅触角的内侧安装有两排吸盘。位于抓手顶端的小型吸盘被动发挥作用,而在较大的吸盘上则可以应用真空,以牢固地抓住物体。由此将吸附与缠绕两种方式结合,实现对多种不同形状、不同尺寸、不同摆放姿态物体的安全、无损、稳定抓持。相比传统刚性体机器人,仿生软体触手具备的柔性抓取特性使其可以更加高效、安全地与人类和自然界进行交互。
该项目由Festo 与北京航空航天大学文力副教授及其实验室团队历时一年半合作完成。对此次合作,文力副教授表示:“仿生软体机器人是一项集材料、力学、生物学、自动化等多学科的交叉研究,也是目前国际学术界的前沿研究热点。其未来应用除了工业抓持,还可以应用到家庭服务、医疗康复、智能穿戴等多个领域。”


(项目负责人:前排,左一,Festo 仿生项目负责人Elias Knubben博士;后排中间,北京航空航天大学文力副教授)
OctopusGripper视频链接:
BionicMotionRobot-具有自然运动特性的轻型机器人
无论是敏感、柔和、强大或动态特性要求,均可一一满足——BionicMotionRobot从象鼻和章鱼触须的运动中获得启发,采用了柔性气动波纹管结构和相应的阀和控制技术,能毫不费力地模仿这两种原型的动作。气动轻型机器人拥有十二个自由度,这种仿生手臂的负载能力为三公斤– 与本身重量相当。
波纹管由坚固的弹性体构成。每个均由独特的3D纺织面料包裹,与章鱼触须的肌纤维类似,得益于这一创新纤维技术,波纹管结构能够向所需运动方向进行伸展,同时在另一个方向上受限,首次能最大限度释放可用力。
BionicMotionRobot的手臂由三个基础节段构成,每段均由四个气动波纹管驱动。Festo Motion Terminal(Festo数字控制终端)负责十二个柔性波纹管结构的复杂控制和调节任务。安装在系统纵轴的光学外形传感器识别整体运动装置的位置、形状和互动。通过这种模块化设计,机器人手臂可在三个不同的方向上同时弯曲,并流畅地对其生物学原型的自然运动予以转化。
柔性运动装置概念以2010年的仿生搬运助手为基础,后者以其安全可靠的人机合作特点荣获德国未来奖。

视频链接:
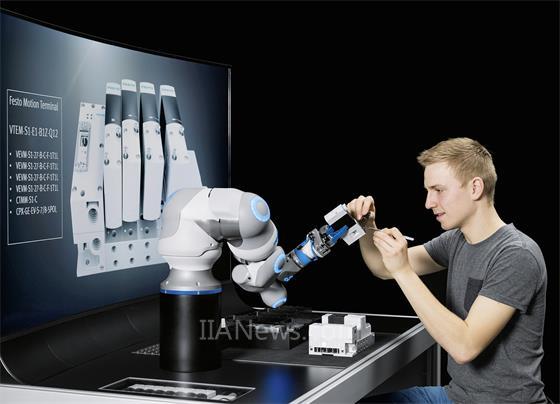
BionicCobot-敏感的人机协作帮手
BionicCobot运动方式以人类手臂为原型,整个结构包括肩膀、上臂、肘、桡骨和尺骨以及爪手。该机器人有七个关节,每个关节都利用了二头肌和三头肌的自然工作机制 – 伸屈肌群高效率的相互作用。藉此,这个机器人可实现非常精细的动作,跟人的手臂功能无异。
BionicCobot 可以进行精细调节,动作可充满力量、敏捷,或敏感柔和、一触即收;因此该系统即使与人发生碰撞也不会危及人身安全。这种特性的实现要归功于Festo Motion Terminal(数字控制终端),这是一种气动自动化平台,在小空间中整合了高精度机械元件、传感器、复杂的控制和测量技术。
取决于待执行的工作, BionicCobot 能配备多种不同的抓取系统。通过特别开发的图形用户界面可直观地进行操作:用户可示教BionicCobot 需要执行的动作,配置相应的参数。设置的工序可用拖拽功能复制到工序排序界面中,可实现任意运动顺序。整个运动顺序在联机设定时,机器人会同步完成动作。平板电脑和Festo Motion Terminal(数字控制终端)之间的接口是机器人操作系统( ROS)平台,可计算动态路径规划。
视频链接:
仿生学习网络
Festo仿生学习网络在世界上享有盛誉,通过与世界著名大学、研究机构和开发型企业合作,在过去10余年研制出一系列闻名世界的仿生机器人,如智能飞鸟,仿生蝴蝶,仿生袋鼠等。其目标是借助仿生学让自动化运动过程更具效率和成效,为自动化世界提供源源不断的灵感。









































































 京公网安备 11011202001138号
京公网安备 11011202001138号