




PID控制原理和特点
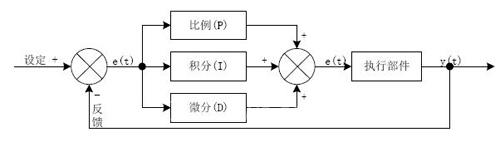
工程实际中,应用最为广泛调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要技术之一。当被控对象结构和参数不能完全掌握,或不到精确数学模型时,控制理论其它技术难以采用时,系统控制器结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象﹐或不能有效测量手段来获系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是系统误差,利用比例、积分、微分计算出控制量进行控制。
1.比例控制(P)
比例控制是最常用的控制手段之一,比方说我们控制一个加热器的恒温100度,当开始加热时,离目标温度相差比较远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数
e(t) = SP – y(t)-
u(t) = e(t)*P
SP——设定值
e(t)——误差值
y(t)——反馈值
u(t)——输出值
P——比例系数
滞后性不是很大的控制对象使用比例控制方式就可以满足控制要求,但很多被控对象中因为有滞后性。也就是如果设定温度是200度,当采用比例方式控制时,如果P选择比较大,则会出现当温度达到200度输出为0后,温度仍然会止不住的向上爬升,比方说升至230度,当温度超过200度太多后又开始回落,尽管这时输出开始出力加热,但温度仍然会向下跌落一定的温度才会止跌回升,比方说降至170度,最后整个系统会稳定在一定的范围内进行振荡。如果这个振荡的幅度是允许的比方说家用电器的控制,那则可以选用比例控制
2.比例积分控制(PI)
积分的存在是针对比例控制要不就是有差值要不就是振荡的这种特点提出的改进,它常与比例一块进行控制,也就是PI控制。
其公式有很多种,但大多差别不大,标准公式如下:
u(t) = Kp*e(t) + Ki∑e(t)+u0
u(t)——输出
Kp——比例放大系数
Ki——积分放大系数
e(t)——误差
u0——控制量基准值(基础偏差)
大家可以看到积分项是一个历史误差的累积值,如果光用比例控制时,我们知道要不就是达不到设定值要不就是振荡,在使用了积分项后就可以解决达不到设定值的静态误差问题,比方说一个控制中使用了PI控制后,如果存在静态误差,输出始终达不到设定值,这时积分项的误差累积值会越来越大,这个累积值乘上Ki后会在输出的比重中越占越多,使输出u(t)越来越大,最终达到消除静态误差的目的
PI两个结合使用的情况下,我们的调整方式如下:
1、先将I值设为0,将P值放至比较大,当出现稳定振荡时,我们再减小P值直到P值不振荡或者振荡很小为止(术语叫临界振荡状态),在有些情况下,我们还可以在些P值的基础上再加大一点。
2、加大I值,直到输出达到设定值为止。
3、等系统冷却后,再重上电,看看系统的超调是否过大,加热速度是否太慢。
通过上面的这个调试过程,我们可以看到P值主要可以用来调整系统的响应速度,但太大会增大超调量和稳定时间;而I值主要用来减小静态误差。
pid 算法
控制点目前包含三种比较简单的PID控制算法,分别是:增量式算法,位置式算法,微分先行。这三种是最简单的基本算法,各有其特点,一般能满足控制的大部份要求:
增量式算法
离散化公式(注:各符号含义如下):
u(t)----- 控制器的输出值。
e(t)----- 控制器输入与设定值之间的误差。
Kp------- 比例系数。
Ti------- 积分时间常数。
Td------- 微分时间常数。
T-------- 调节周期。
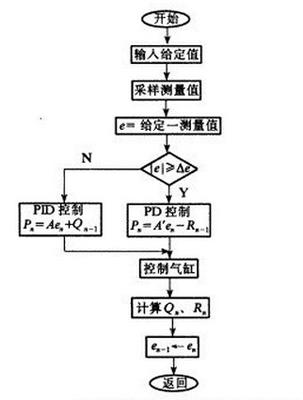
2.积分分离法
离散化公式:
Δu(t) = q0e(t) + q1e(t-1) + q2e(t-2)
当|e(t)|≤β时
q0 = Kp(1+T/Ti+Td/T)
q1 = -Kp(1+2Td/T)
q2 = Kp Td /T
当|e(t)|>β时
q0 = Kp(1+Td/T)
q1 = -Kp(1+2Td/T)
q2 = Kp Td /T
u(t) = u(t-1) + Δu(t)
注:各符号含义如下
u(t)----- 控制器的输出值。
e(t)----- 控制器输入与设定值之间的误差。
Kp------- 比例系数。
Ti------- 积分时间常数。
Td------- 微分时间常数。(有的地方用"Kd"表示)
T-------- 调节周期。
β------- 积分分离阈值
3.微分先行PID算法
离散化公式:
u(t)----- 控制器的输出值。
e(t)----- 控制器输入与设定值之间的误差。
Kp------- 比例系数。
Ti------- 积分时间常数。
Td------- 微分时间常数。(有的地方用"Kd"表示)
T-------- 调节周期。
β------- 积分分离阈值
PID控制:
因为PI系统中的I的存在会使整个控制系统的响应速度受到影响,为了解决这个问题,我们在控制中增加了D微分项,微分项主要用来解决系统的响应速度问题,其完整的公式如下:
u(t) = Kp*e(t) + Ki∑e(t) + Kd[e(t) –e(t-1)]+u0
在PID的调试过程中,我们应注意以下步骤:
1)关闭I和D,也就是设为0.加大P,使其产生振荡;
2)减小P,找到临界振荡点;
3)加大I,使其达到目标值;
4)重新上电看超调、振荡和稳定时间是否吻合要求;
5)针对超调和振荡的情况适当的增加一些微分项;
6)注意所有调试均应在最大争载的情况下调试,这样才能保证调试完的结果可以在全工作范围内均有效;
PID控制器参数整定:
PID控制器参数整定是控制系统设计核心内容。它是被控过程特性确定PID控制器比例系数、积分时间和微分时间大小。PID控制器参数整定方法很多,概括起来有两大类:一是理论计算整定法。它主依据系统数学模型,理论计算确定控制器参数。这种方法所到计算数据未必可以直接用,还必须工程实际进行调整和修改。二是工程整定方法,它主要依赖工程经验,直接控制系统试验中进行,且方法简单、易于掌握,工程实际中被广泛采用。PID控制器参数工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是试验,然后工程经验公式对控制器参数进行整定。但采用哪一种方法所到控制器参数,都需要实际运行中进行最后调整与完善。现一般采用是临界比例法。利用该方法进行PID控制器参数整定步骤如下:
(1)首先预选择一个足够短采样周期让系统工作;
(2)仅加入比例控制环节,直到系统对输入阶跃响应出现临界振荡,记下这时比例放大系数和临界振荡周期;
(3)一定控制度下公式计算到PID控制器参数。












































































 京公网安备 11011202001138号
京公网安备 11011202001138号